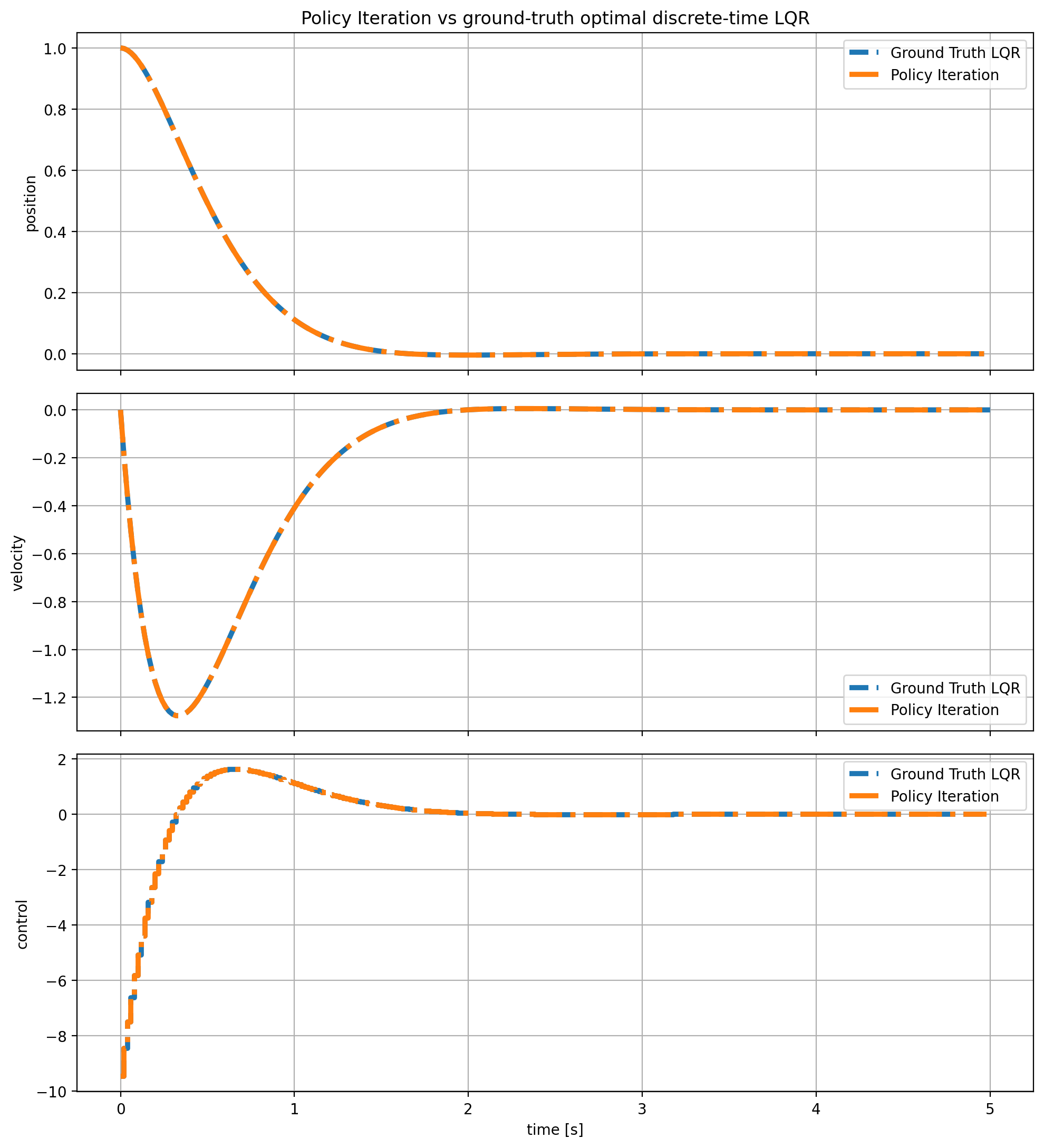
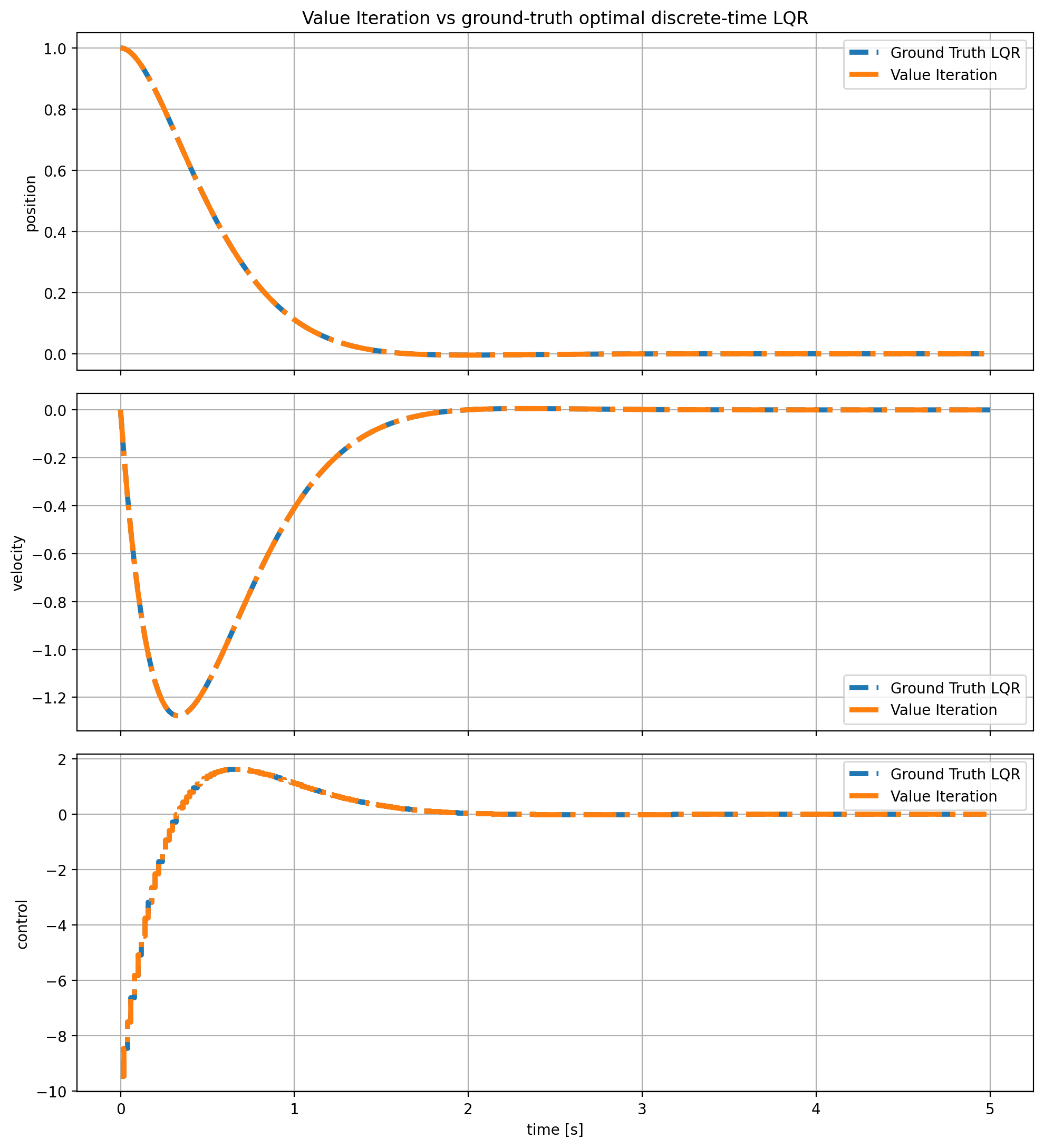
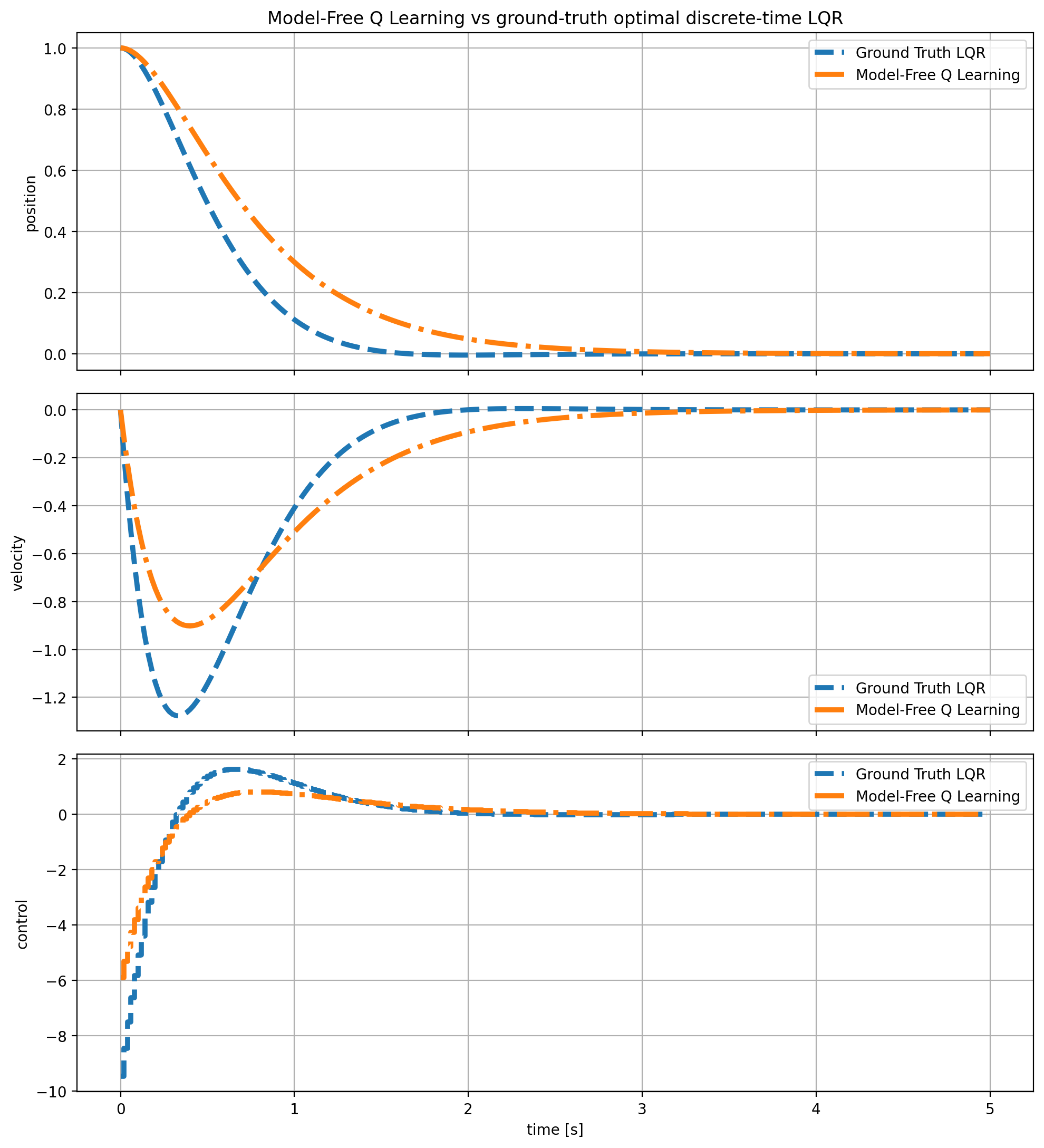
▪ Solve-LQR-3Ways
Modular implementation of basic motion planning algorithm that based on Model Predictive Control (MPC) and Control Barrier Function (CBF).
[Code] [Blog Post]
Modular implementation of basic motion planning algorithm that based on Model Predictive Control (MPC) and Control Barrier Function (CBF).
[Code] [Blog Post]