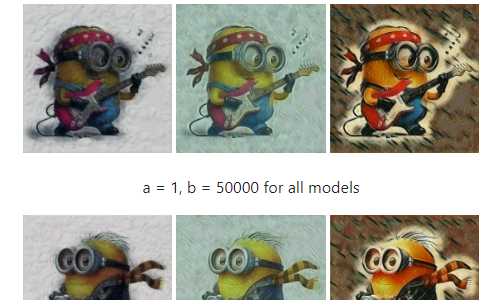
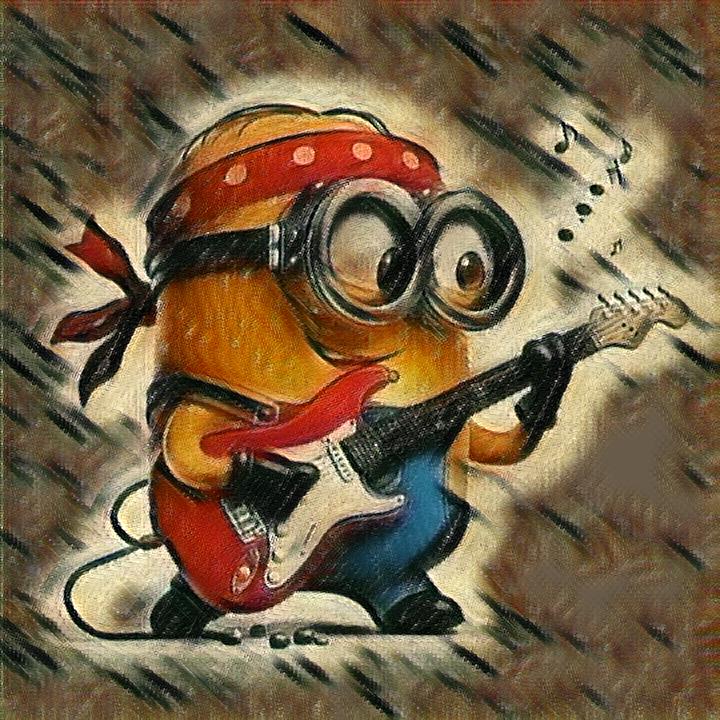
▪ Basic-and-Fast-Neural-Style-Transfer
Simplified implementation of basic neural style transfer and fast neural style transfer in PyTorch.
[Blog Post] [Code]
Simplified implementation of basic neural style transfer and fast neural style transfer in PyTorch.
[Blog Post] [Code]
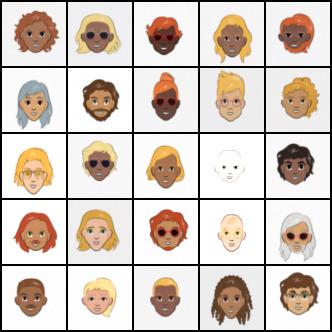
Minimal implementation of VAE and diffusion models for cartoon images generation..
[Blog Post] [Code]

Modular implementation of basic motion planning algorithm that based on Model Predictive Control (MPC) and Control Barrier Function (CBF).
[Code] [Slide]
Simple scripts that are used for solving motion planning & obstacle avoidance problems via Model Predictive Control (MPC) & Control Barrier Function (CBF).
[Code] [Report] [Slide]

Use Iterative Learning Control (ILC) for trajectory tracking task with the existence of model mismatch. Model Predictive Control (MPC) is also used for comparison.
[Code] [Report] [Slide]
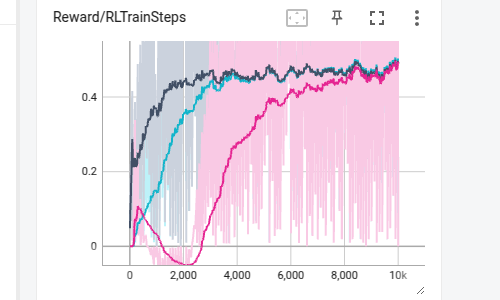
![]()
Minimal implementation of RL algorithms (DQN, DDPG and PPO) in Isaac Gym cartpole environment.
[Code] [Blog Post 1] (DQN & DDPG) [Blog Post 2] (PPO)
PyTorch implementation of RLPD using dm_control suite. DrQ-v2 is also included.
[Code]

PyTorch implementation of off-policy RL algorithms (TD3 and SAC). Tested in OpenAI Gymnasium.
[Blog Post] [Code]
Collection of small-scale projects for testing robotics algorithms in the MuJoCo simulator. (Ongoing project)
[Code] [Blog Post]
